主题
4. 产品简介
4.1 产品信息
产品名称:具身天工机器人
产品型号:2.0 Plus
4.2 产品介绍
天工是北京人形机器人创新中心研发的全尺寸纯电驱拟人奔跑机器人,具备高度仿生的躯干构型和拟人化的运动控制。整机拥有 21 个自由度,支持站立、行走、奔跑及四个特定动作,并能稳定适应多种复杂地形。系统搭载强劲关节驱动系统、高精度 IMU、双电池快换模块与语音模组,结合语音交互大模型,支持语音控制;续航时长超过 4 小时。作为通用人形机器人母平台,天工可开放给各行业使用,支持二次开发,广泛适用于科研、教育与工业应用场景。
4.3 功能特点
复杂地形自适应:可平稳行走于楼梯、斜坡、沙地等不规则地形;
拟人化奔跑:具备稳定奔跑能力;
动态平衡控制:能实时抗外部干扰,维持姿态稳定;
两种运控模式:已部署传统运控模式和强化学习运控模式;
语音交互控制:搭载语音模组与语音大模型,支持自然语音指令与交互;
开放式 API:支持开发者调用全身关节及传感器控制接口,实现个性化功能定制和扩展。
4.4 应用场景
- 高校科研教育
- AI具身智能本体
- 工业自动化
- 安防救援
- 康复医疗
- 演艺展览
- 迎宾接待
- 智能家居
4.5 产品组成
4.5.1 机器人组成
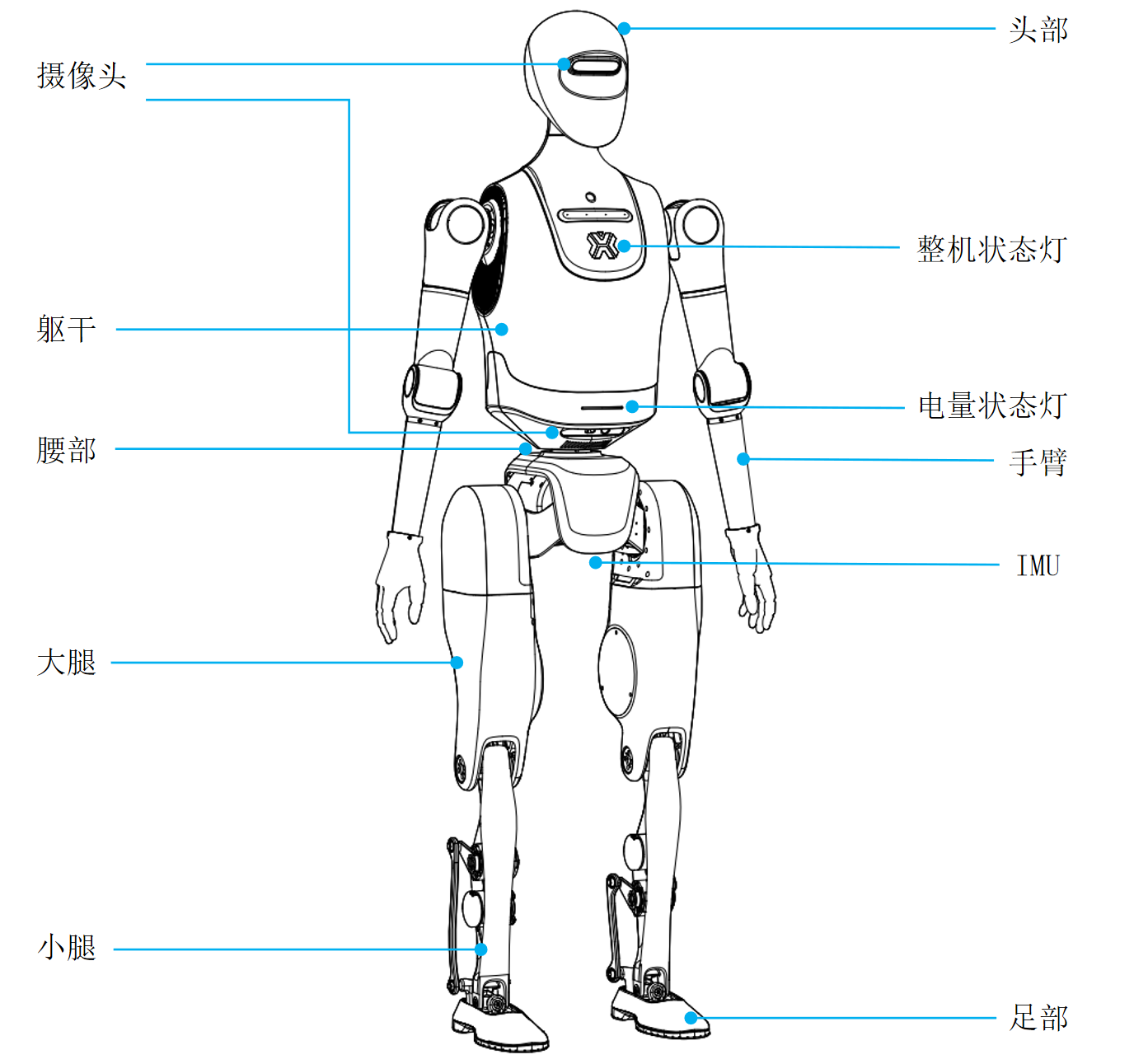 | 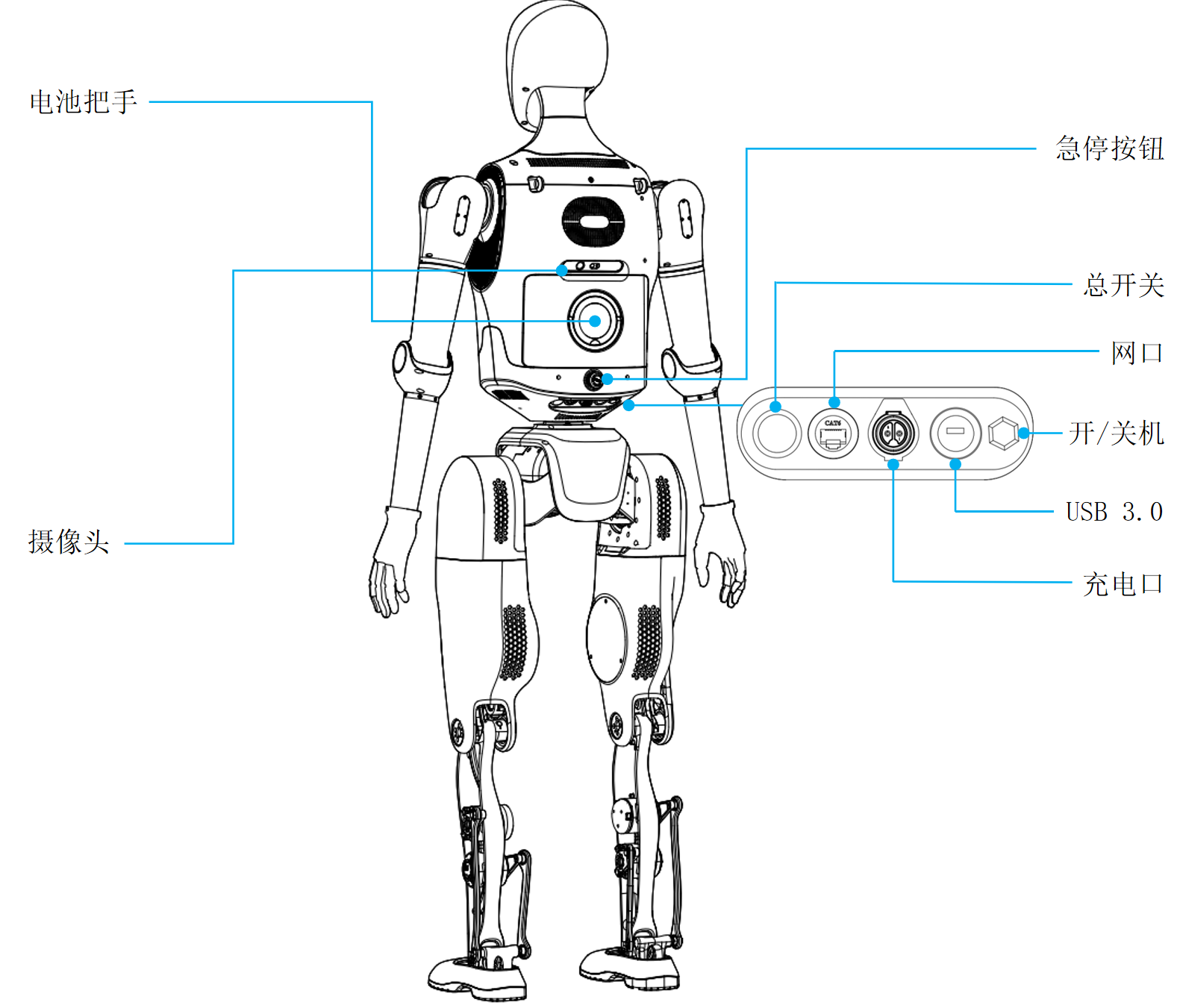 |
4.5.2 遥控器说明
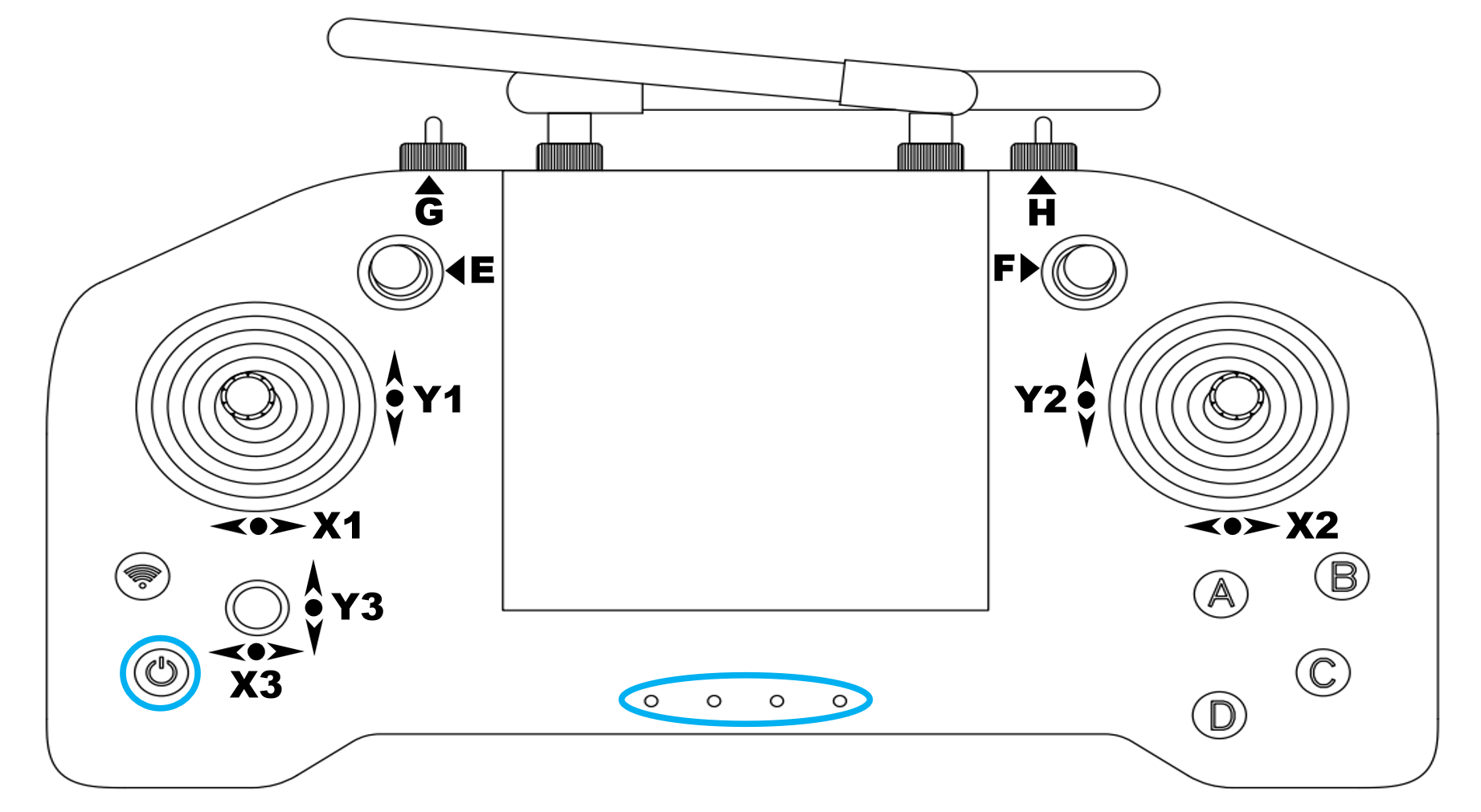
遥控器按键示意图
| 遥控器按键功能说明(强化学习运控模式) | |
|---|---|
| 功能 | 按键 |
| 回零 | D |
| 僵停 | C |
cmd_vel控制模式 | F - 往上拨杆 |
| 站立 | H - 往中拨杆 + A |
| 行走 | H - 往左拨杆 |
| 跑步 | H - 往右拨杆 |
| 挥手 | E - 上拨零次/下拨七次 + G - 往右拨杆 |
| 跳舞1 | E - 上拨一次/下拨六次 + G - 往右拨杆 |
| 跳舞2 | E - 上拨二次/下拨五次 + G - 往右拨杆 |
| 鞠躬 | E - 上拨三次/下拨四次 + G - 往右拨杆 |
| 握手 | E - 上拨四次/下拨三次 + G - 往右拨杆 |
| 左右移动 | X1 - 左摇杆: 左右 |
| 前后移动 | Y1 - 左摇杆: 上下 |
| 顺、逆时针旋转 | X2 - 右摇杆: 左右 |
| 关节失能 | E - 往下拨杆 + B |
| 遥控器按键功能说明(传统运控模式) | |
|---|---|
| 功能 | 按键 |
| 回零 | D |
| 僵停 | C |
cmd_vel控制模式 | F - 往上拨杆 |
| 站立 | H - 往中拨杆 + A |
| 行走 | B |
| 左右移动 | X1 - 左摇杆: 左右 |
| 前后移动 | Y1 - 左摇杆: 上下 |
| 顺、逆时针旋转 | X2 - 右摇杆: 左右 |
| 关节失能 | E - 往下拨杆 + F - 往下拨杆 |